|
||
| Menu | Demo / BiomechanicalTongueModel | |
|
Downloads Installation Instructions Learning Java Documentation Tutorials Update Log
Publications People Project Roadmap Code of Conduct |
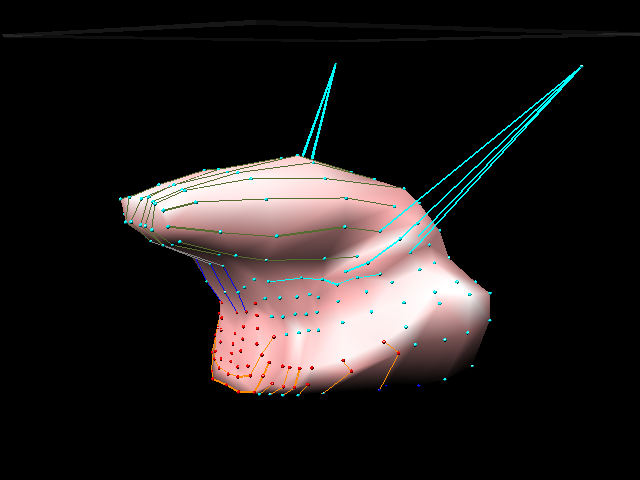
Biomechanical Tongue Model There is an increasing need for fast, accurate simulation of the human oral pharyngeal anatomy to support research activities in medicine, dentistry, and linguistics. Applications include: the study of physiological activities (such as speech production, breathing, and swallowing), surgical and dental training, and outcome prediction for clinical procedures. Dynamic anatomical models also allow inverse modeling, in which simulation is used to estimate physiological quantities (such as muscle activation levels) which are difficult to measure directly on live subjects. For this purpose we created a biomechanical 3d Tongue model [1] with fast 3D finite element method (FEM) and methods to connect to other models. Our simulation method uses a linear stiffness-warping scheme or Biot Strain to achieve speeds that are within a factor 10 of real-time rates at the expense of a small loss in accuracy. Muscle activations are produced by an arrangement of forces acting along selected edges of the FEM geometry. The model's dynamics are integrated using an implicit Euler formulation, which can be solved using either the conjugate gradient method or a direct sparse solver. The biomechanical tongue model geometry was created in [2], and was derived from medical image data. This geometry contains 946 nodes, connected to form 740 hexahedral elements. These hexahedra were further subdivided into 3700 tetrahedra (using the optimal number of five tetrahedra per hexahedron), as our present implementation of the stiffness-warping algorithm requires tetrahedral geometry. Furthermore, the model contains 11 muscles groups (intrinsic and extrinsic) to allow the actuation of the model. Video| Tongue Movement Video
References
|
|
| View Edit Attributes History Attach Print Search Page last modified on April 18, 2022, at 04:19 PM | ||